遅延実行#
ステータス監視#
指定のステータスを監視して、ステータスの数値が0以外になったら次のコマンドを実行します。
列車が特定の区間に入ったら検出するセンサーで監視対象のステータスを1にすることで、実行を再開するような仕組みを実現できます。
台車通過監視#
編成の最後の台車が通過するまで実行を停止します。
センサーの検知は、先頭台車を設定してください。
列車全体が、完全に通過したあとに実行を再開することができます。列車が通過中に進行方向が逆向きにならない、遅延実行コマンドが実行される前に列車が通過しないなどの制限があります。
制限時間#
実行を一時停止する時間です。0を設定した場合は、無期限に一時停止します。5000ミリ秒を設定した場合は、5秒以内に指定の条件を満たした、または、5秒経過したら実行を再開します。
パラメータの制限時間を省略した場合は、無期限になります。
遅延実行後のコマンドの時間設定#
遅延実行のあとに設定されているコマンドは、実行が再開された時点で「時間=0」になります。遅延実行のコマンドのあとに設定するコマンドは、再開後の時間を設定してください。
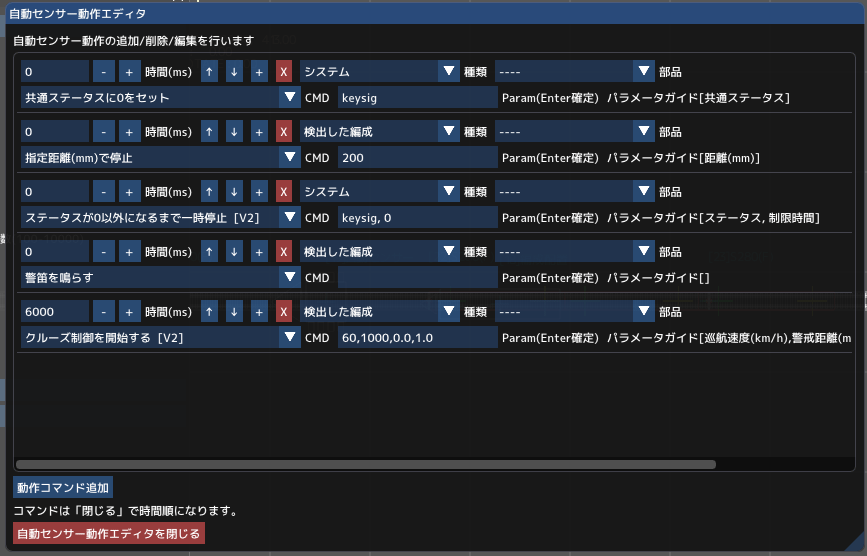 列車を停止します。その後、ステータスを監視して、条件を満たしたら運転を再開します。運転開始は、条件が満たされてから6秒後に設定しています。
列車を停止します。その後、ステータスを監視して、条件を満たしたら運転を再開します。運転開始は、条件が満たされてから6秒後に設定しています。
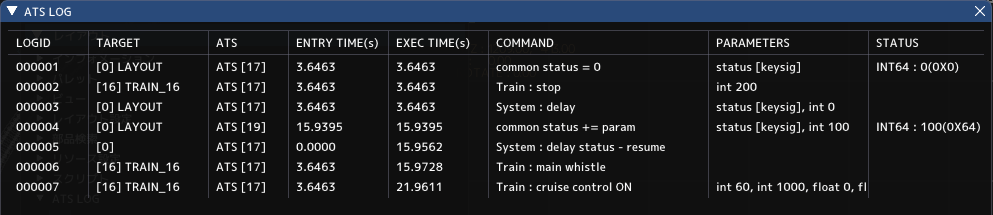 実行ログです。
実行ログです。
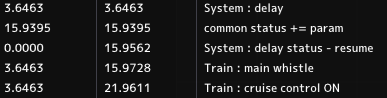 15.9秒で条件が満たされて、実行が再開されています。6秒後の21.9秒にクルーズ制御が実行され運転開始しています。
15.9秒で条件が満たされて、実行が再開されています。6秒後の21.9秒にクルーズ制御が実行され運転開始しています。