設定#
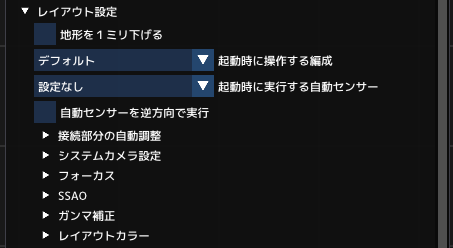
レイアウトを設定します。
地形を1ミリ#
ビュワーの地形表示を1ミリ下げます。建物、道路などを地形にあわせて配置したときに、ポリゴンが重なるのを防止できます。
起動時操作編成#
ビュワーを起動したときに指定した編成を操作表示対象にします。
地上カメラが機能している場合は、地上カメラが優先されます。
起動時に実行する自動センサー#
ビュワー起動時に実行する自動センサーを指定します。検出列車なしで自動センサーに設定されているコマンドを実行します。
自動センサーを逆方向で実行#
上記で指定した自動センサーを実行するときに逆方向で検出したと仮定して実行します。
システムカメラ#
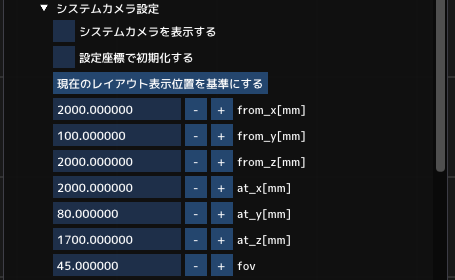
システムカメラを表示する#
ビュワーを起動後、列車カメラではなくシステムカメラで表示します。
設定座標で初期化する#
FROM-ATの座標とFOVを設定します。座標は、レイアウトの範囲内です。座標を設定後、チェックしてください。チェックしていない場合は、システムの標準で設定されます。
FOVは、視野の広さです。角度であらわします。初期値は45度です。
試運転モードは、設定された数値ではなくレイアウターの表示位置で初期化されます。
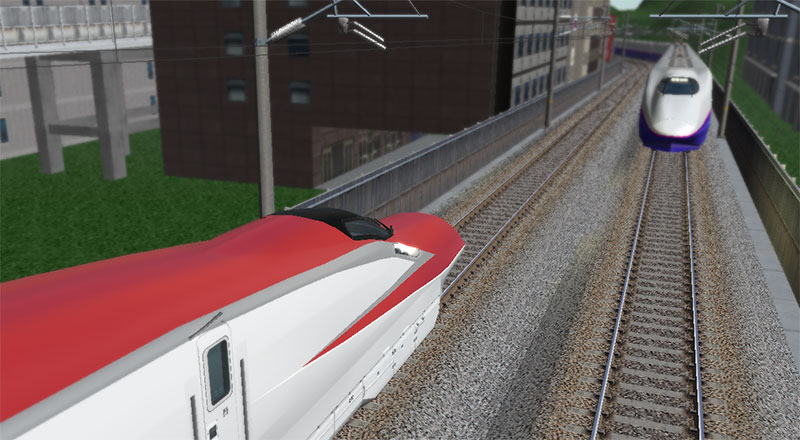
フォーカス#
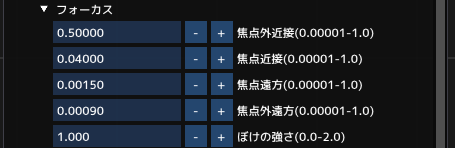
被写界深度についての設定です。0.00001から1.0の範囲でzの値を指定します。 ぼけが生じる範囲を画面に近い方と遠方、それぞれ設定します。焦点外は、完全にぼけがはじまる境界線です。
SSAO#

スクリーンスペースアンビエントオクルージョンの効果を設定します。アンビエントオクルージョンは、物体の表面に届く光線を遮蔽率からもとめて、環境光の陰影をつくります。非常にリアルな効果が得られます。
VRMNXのアンビエントオクルージョンは、遮蔽率ではなく、光線の集中度を計算する全く新しい方式です。既存のアンビエントオクルージョンより正確で格段に少ない計算量で結果が得られます。

ガンマ補正#
ガンマ補正と露光を行います。いずれも明るさを補正します。ガンマ補正は、テレビモニターと同様なガンマカーブによる補正を行います。 露光は、写真の露光と同様な計算を行います。
ドキュメントカラー#
選択時カラー#
部品を選択したときに設定した色で表示します。チェックを外した場合は、従来の動作になります。
高度差カラー#
部品の設置高度によって色を変化させます。 勾配区間、高架区間などを視覚的に把握できます。