VRMATS#
自動センサー#
線路上に配置した自動センサーは、編成の通過を検出して、'catch'イベントを発行します。
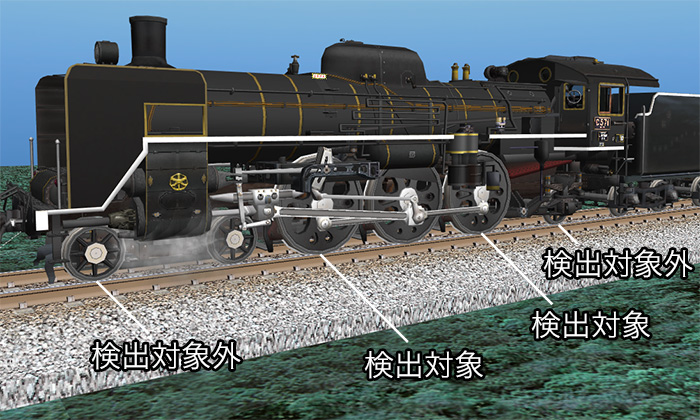
検出車輪について#
蒸気機関車、旧型電気機関車は、先台車、従台車が付属している場合があります。付属台車は、本体の位置決定後に付属品として計算、位置が決定します。本体の位置を決定する動輪が、検出対象になります。
イベント#
| event | guide | 固有param | |
|---|---|---|---|
| catch | 列車を検出したときに発生します。 | trainid | 編成ID |
| dir | センサーに対する進入方向 -1:逆方向 1:順方向 | ||
| tire | 検出した車輪 1:先頭 2:最後尾 |
イベントハンドラサンプル#
#OBJID=5
import vrmapi
def vrmevent_5(obj,ev,param):
if ev == 'init':
dummy = 1
elif ev == 'broadcast':
dummy = 1
elif ev == 'timer':
dummy = 1
elif ev == 'time':
dummy = 1
elif ev == 'after':
dummy = 1
elif ev == 'frame':
dummy = 1